|
Abstract
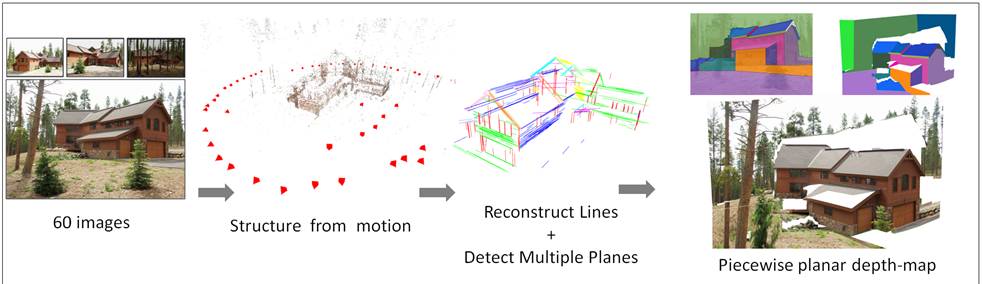
We present a novel multi-view
stereo method designed for image-based rendering that generates piecewise
planar depth maps from an unordered collection of photographs. First a
discrete set of 3D plane candidates are computed based on a sparse point
cloud of the scene (recovered by structure from motion) and sparse 3D line
segments reconstructed from multiple views. Next, evidence is accumulated for
each plane using 3D point and line incidence and photo-consistency cues.
Finally, a piecewise planar depth map is recovered for each image by solving
a multi-label Markov Random Field (MRF) optimization problem using
graph-cuts. Our novel energy minimization formulation exploits high-level
scene information. It incorporates geometric constraints derived from
vanishing directions, enforces free space violation constraints based on ray
visibility of 3D points and 3D lines and imposes smoothness priors specific
to planes that intersect.
We
demonstrate the effectiveness of our approach on a wide variety of outdoor
and indoor datasets. The view interpolation results are perceptually pleasing,
as straight lines are preserved and holes are minimized even for challenging
scenes with non-Lambertian and texture-less surfaces.
|
|
Paper 
Video (Divx) 
More Results   
|